Stm32之I2C
I2C也是串行通讯中常采用的协议之一,和USART有所同,也有所不同。
I2C通信协议简介
I2C(Inter IC Bus)是由Philips公司开发的一种通用数据总线
两根通信线:SCL(Serial Clock)、SDA(Serial Data)
同步,半双工
带数据应答支持总线挂载多设备(一主多从、多主多从)
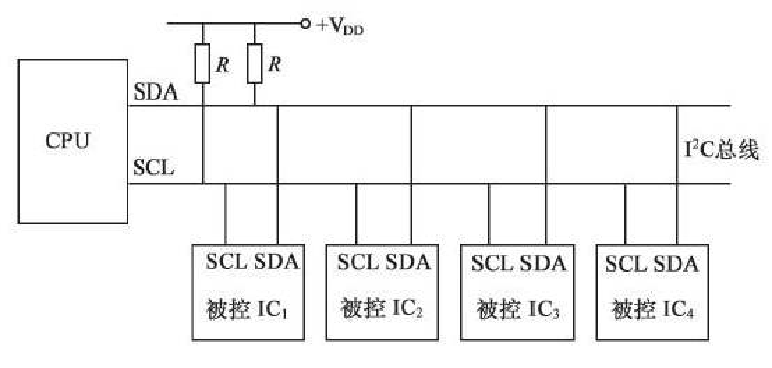
硬件电路要求
所有I2C设备的SCL连在一起,SDA连在一起
设备的SCL和SDA均要配置成开漏输出模式
SCL和SDA各添加一个上拉电阻,阻值一般为4.7KΩ左右
I2C时序
指定地址读
对于指定设备(Slave Address),在指定地址(Reg Address)下,读取从机数据(Data)

起始位->指定设备地址+读/写位->应答位->指定寄存器地址->应答位->重复起始位->指定设备地址+读/写位->接收数据->应答位->停止位
NOTICE:停止位之前,主机应答位要置1。
MPU6050简介
MPU6050是一个6轴姿态传感器,可以测量芯片自身X、Y、Z轴的加速度、角速度参数,通过数据融合,可进一步得到姿态角,常应用于平衡车、飞行器等需要检测自身姿态的场景
3轴加速度计(Accelerometer):测量X、Y、Z轴的加速度
3轴陀螺仪传感器(Gyroscope):测量X、Y、Z轴的角速度
MPU6050参数
16位ADC采集传感器的模拟信号,量化范围:-32768~32767
加速度计满量程选择:±2、±4、±8、±16(g)
陀螺仪满量程选择: ±250、±500、±1000、±2000(°/sec)
可配置的数字低通滤波器
可配置的时钟源
可配置的采样分频I2C
从机地址:1101000(AD0=0)、1101001(AD0=1)
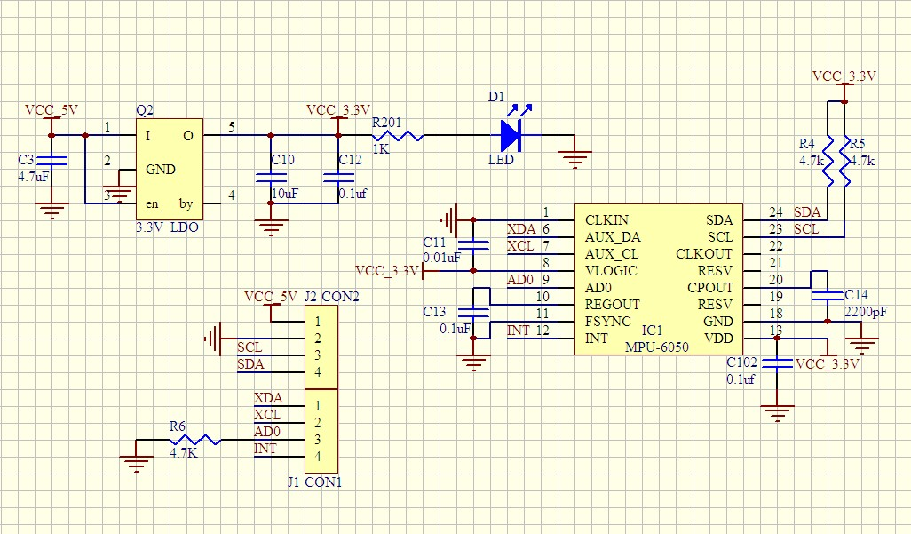
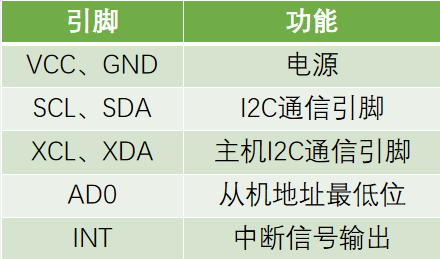
硬件电路
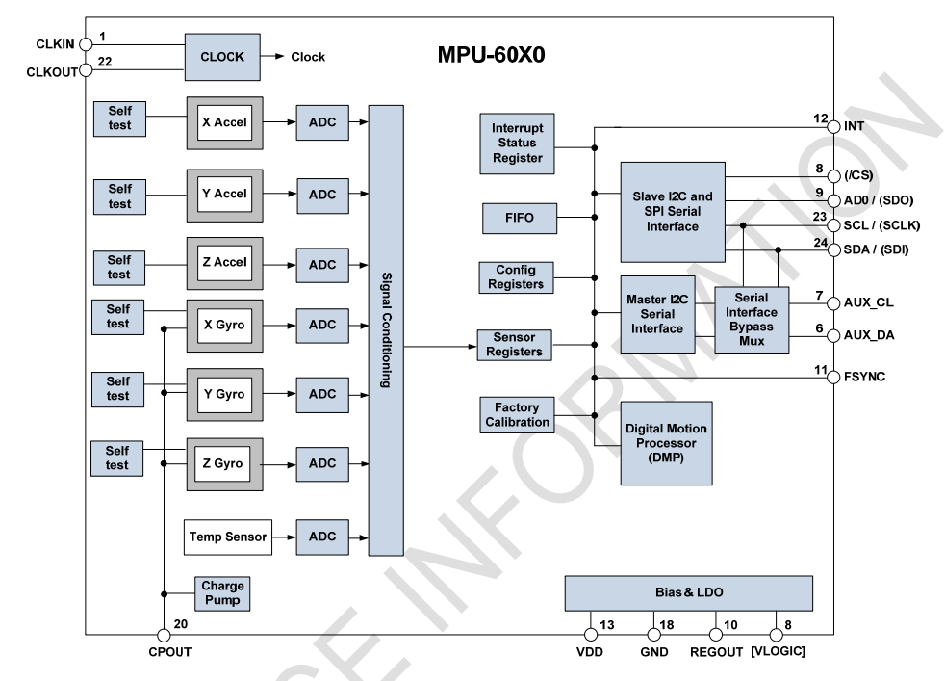
MPU6050框图
I2C外设简介
- STM32内部集成了硬件I2C收发电路,可以由硬件自动执行时钟生成、起始终止条件生成、应答位收发、数据收发等功能,减轻CPU的负担
- 支持多主机模型
- 支持7位/10位地址模式
- 支持不同的通讯速度,标准速度(高达100 kHz),快速(高达400 kHz)支持DMA
- 兼容SMBus协议
- STM32F103C8T6 硬件I2C资源:I2C1、I2C2
I2C框图
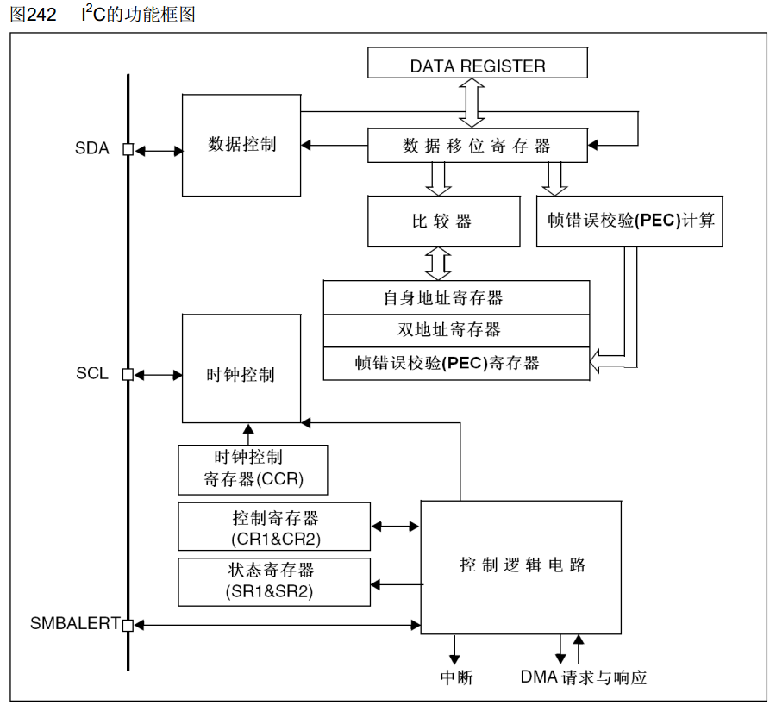
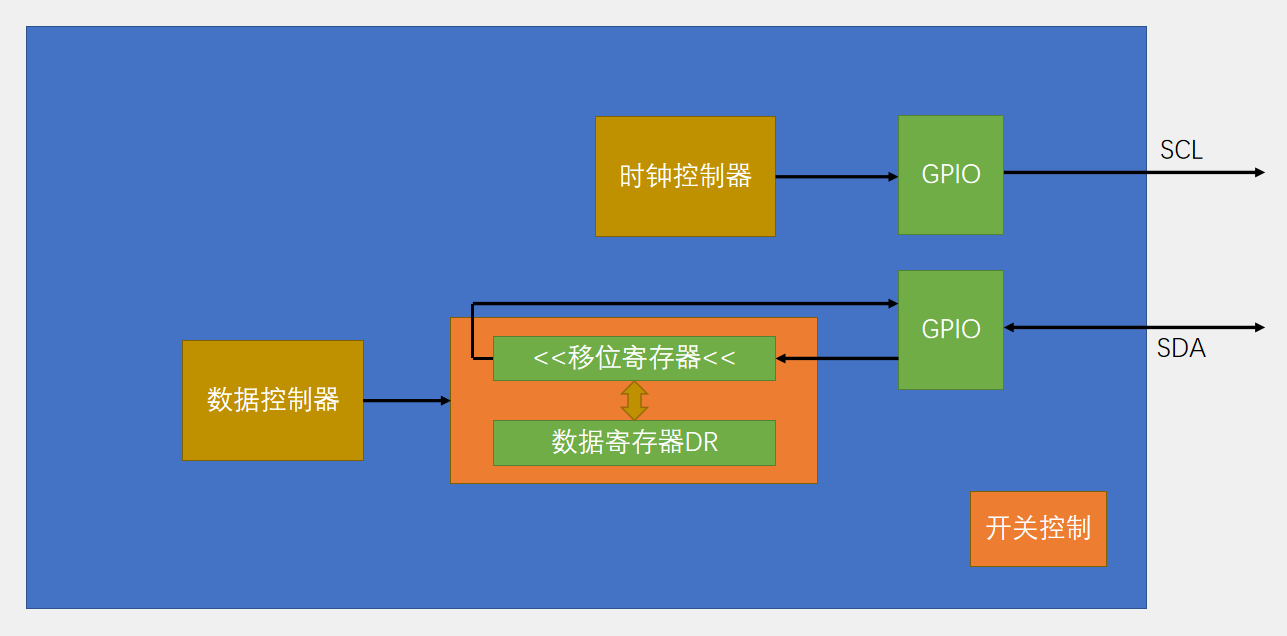
I2C基本结构
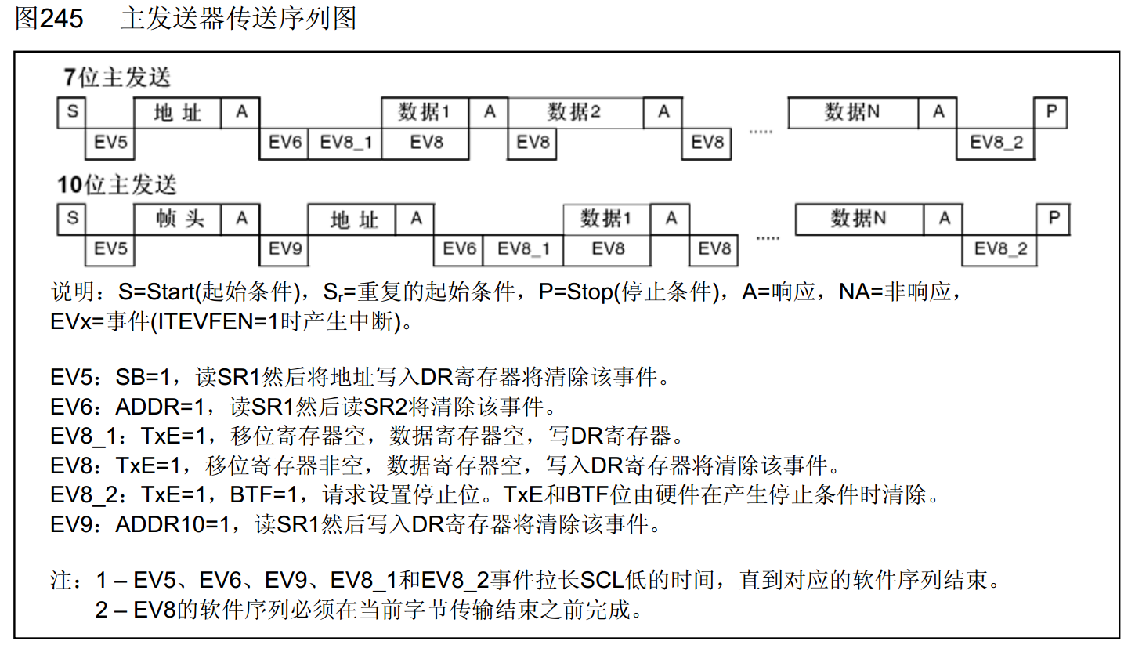
主机发送
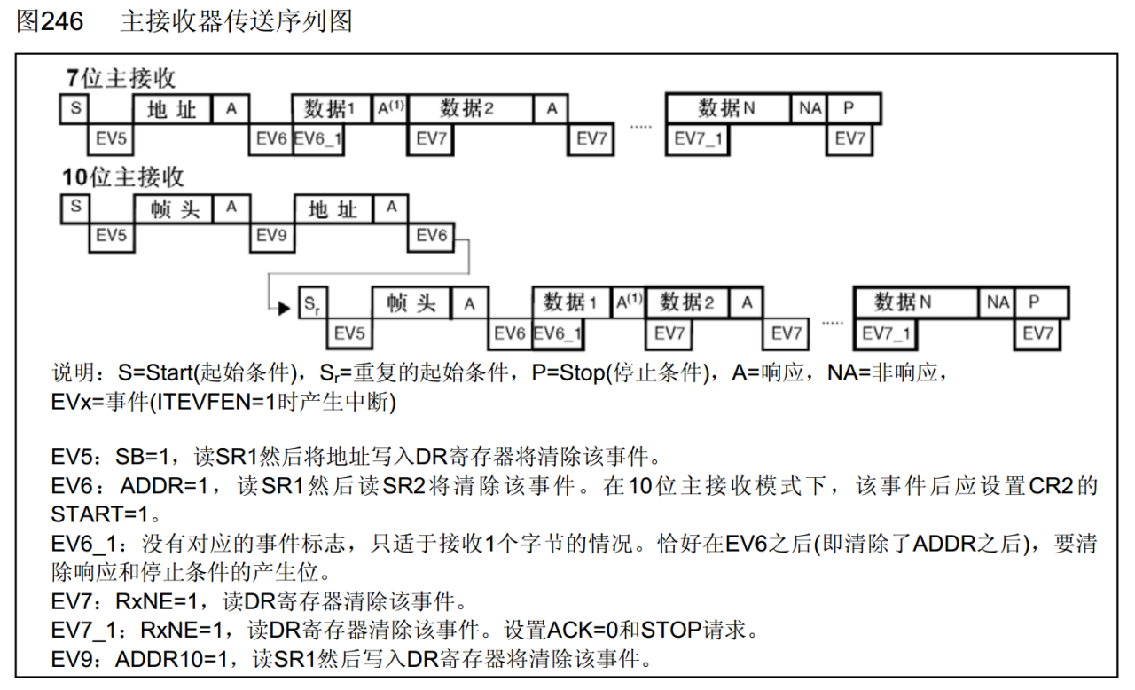
主机接受
代码演示
1 | //硬件IIC |
END
本博客所有文章除特别声明外,均采用 CC BY-NC-SA 4.0 许可协议。转载请注明来源 Lisp's Blog!
 wechat
wechat alipay
alipay
相关推荐

2025-02-03
Stm32之ADC
本篇文章主要介绍ADC模数转换器及DMA转运,这也是Stm32中比较重要的部分,值得大家学习。 ADC简介 ADC(Analog-Digital Converter)模拟-数字转换器 ADC可以将引脚上连续变化的模拟电压转换为内存中存储的数字变量,建立模拟电路到数字电路的桥梁 12位逐次逼近型ADC,1us转换时间 输入电压范围:0~3.3V,转换结果范围:0~4095 18个输入通道,可测量16个外部和2个内部信号源 规则组和注入组两个转换单元 模拟看门狗自动监测输入电压范围 STM32F103C8T6...

2025-02-06
Stm32之SPI
SPI通信也是众多通信协议中比较重要的一种通信协议,由摩托罗拉公司开发,十分值得学习。 SPI 通信简介 SPI(Serial Peripheral Interface)是由Motorola公司开发的一种通用数据总线 四根通信线:SCK(Serial Clock)、MOSI(Master Output Slave Input)、MISO(Master Input Slave Output)、SS(Slave Select) 同步,全双工 支持总线挂载多设备(一主多从) 硬件电路 所有SPI设备的SCK、MOSI、MISO分别连在一起 主机另外引出多条SS控制线,分别接到各从机的SS引脚 输出引脚配置为推挽输出,输入引脚配置为浮空或上拉输入 移位示意图 W25Q64简介 W25Qxx系列是一种低成本、小型化、使用简单的非易失性存储器,常应用于数据存储、字库存储、固件程序存储等场景 存储介质:Nor Flash(闪存) 时钟频率:80MHz / 160MHz (Dual SPI) / 320MHz (Quad...
2025-02-05
Stm32之USART串口
在单片机的应用中,通讯是必不可少的,通过通讯能够收发数据,进而对数据进行处理,进而生成控制指令,或者单纯用来调试,也是非常不错的选择。 通信接口 通信的目的:将一个设备的数据传送到另一个设备,扩展硬件系统 通信协议:制定通信的规则,通信双方按照协议规则进行数据收发 除上面指出的全双工和半双工之外,还有单工,指的是只能从将数据从一处传输至另一处,是单向的。 单端信号需要共地。 串口通信 串口是一种应用十分广泛的通讯接口,串口成本低、容易使用、通信线路简单,可实现两个设备的互相通信 单片机的串口可以使单片机与单片机、单片机与电脑、单片机与各式各样的模块互相通信,极大地扩展了单片机的应用范围,增强了单片机系统的硬件实力 电平标准电平标准是数据1和数据0的表达方式,是传输线缆中人为规定的电压与数据的对应关系,串口常用的电平标准有如下三种: TTL电平:+3.3V 或 +5V 表示 1 ,0V 表示 0 RS232电平:-3 ~ -15V 表示 1,+3 ~ +15V表示 0 RS485电平:两线压差 +2 ~ +6V 表示 1,-2 ~ -6V 表示...
2025-02-01
Stm32之定时器
Stm32中定时器的使用无疑是至关重要的,通过使用定时器可以使我们的流程控制更加简单可控,还可以使我们的代码模块化,方便管理与调试。Stm32的定时器的使用分为定时中断、输出比较、输入捕获、编码器接口这几个主要部分,下面一一来介绍。 定时器框图 定时中断定时中断基本结构 影子寄存器影子寄存器:在改变自动重装寄存器TIMx_ARR时,若开启影子寄存器,该寄存器中的值不会立即更新,而是会在产生又一个更新事件后,更新该寄存器中的值,可以防止某些意外情况的发生。比如,初始ARR的值为5,当计数器中的值为4时更改ARR为3,此时4 >3,但是不等于3,随着时间的增加,计数器中的值只会在超出计数器计数上限时溢出,当计数器中的值再次等于3时才会产生一次更新事件。 计数器溢出频率计数器溢出频率:CK_CNT_OV = CK_CNT / (ARR + 1) = CK_PSC / (PSC + 1) / (ARR +...
评论